-
快速原型:
1、车规级控制器;
2、控制器主频不低于40MHz,FLASH 不低于1MB,RAM 不低于64KB;
3、不低于4 路高速CAN 接口;
4、9-32V 宽压供电;
5、模拟量输入0-5V,12 位精度,不低于10 路;
6、开关量输入不低于16 路;
7、高端开关不低于8 路;
8、低端开关不低于16 路;
开发工具:
1、基于数学建模的模型化应用层软件开发;
2、提供与快速原型相匹配的硬件驱动库;
3、提供与快速原型相匹配的编译、链接工具;
4、提供与快速原型配套的程序烧录、调试器;
5、基于ASAM CCP、XCP 协议,支持CAN 总线及以太网下多ECU 的标定测量,同时支持CCP\XCP下的标定数据下载和程序下载;
6、提供图形化显示和仪表组态功能的上位机监测软件; -
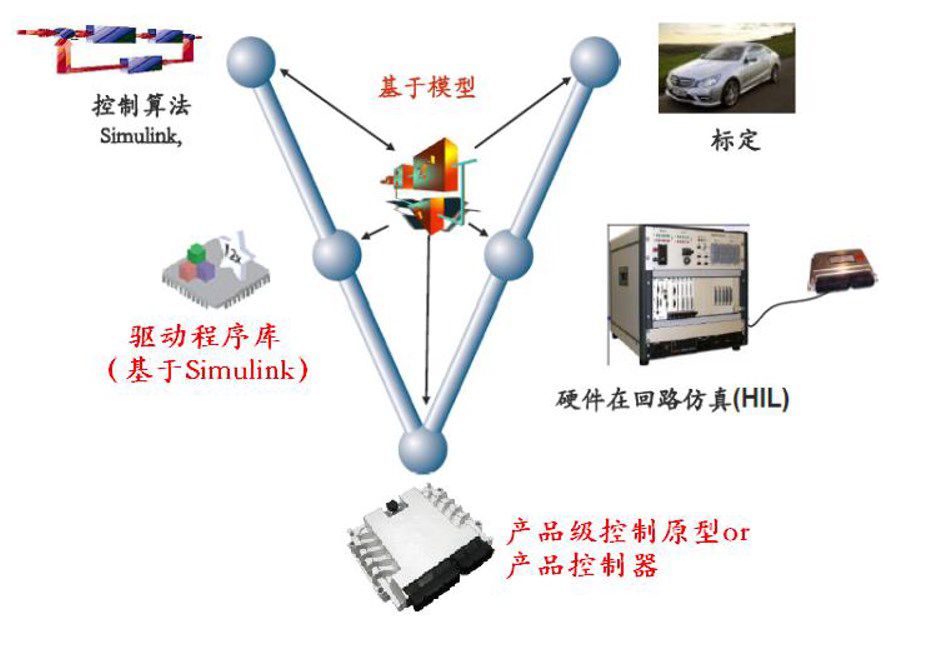
为缩短智能农机装备控制器开发周期,引进V模式的快速原型开发平台。基于V模式的快速原型开发平台开发方案分为:控制算法开发阶段、快速控制原型阶段、目标代码生成阶段、硬件在回路阶段、实车标定阶段。与传统开发方案相比,基于V模式的开发方案引入了确认和验证的概念,控制器开发的各个阶段都可以对上一阶段的成果进行验证,测试的环节贯穿项目始终,大大减少了项目后期的开发风险,减少开发工作量,缩短开发周期。
-
农机装备控制器的快速开发。
-
需专业人员进行操作。
-
合同收费